|
Мухидинов Толеген Махмутдинович / Mukhidinov Tolegen Maxmutdinuly – магистрант,
кафедра систем управления и информатики,
Санкт-Петербургский национальный исследовательский университет информационных технологий, механики и оптики,
г. Санкт-Петербург
Аннотация: в статье рассмотрены двуногие гуманоидные роботы, которые имеют два положения: статический - когда робот стоит на обеих ногах, динамический – когда одна нога поднята.
Abstract: in the article bipedal humanoid robot, which has two positions: static - when the robot is standing on both legs, dynamic - when one foot is lifted. Is expected to move within the anthropocentric installation, which includes a stepped platform.
Ключевые слова: динамическая ходьба, двуногий, перевернутая модель маятника, ZMP, гиперболические и многочленные модели.
Keywords: dynamic walking,biped, inverted pendulum model, ZMP,hyperbolic and polynomial patterns.
Ключ к ходьбе кажется в том, как решить необычную динамическую проблему стабильности, являющуюся результатом эффектов сцепления между вертикальными и горизонтальными движениями, которые не появляется в случае плоских передвижений, поддерживающих постоянную высоту робота. Чтобы обойти такую проблему стабильности, самые вялые роботы имеют тенденцию использования квазистатических образцов ходьбы за счет большего вращающего момента привода головок. С этой целью, принята популярная перевернутая модель маятника, чтобы приблизить динамику двуногого робота. Затем, были применены условия точки равновесия, чтобы получить ограничительное уравнение которые обычно назывались ZMP (Точка Нулевого Момента). После решения уравнения с соответствующими вводами аналитически получены гиперболические траектории для трехмерных движений тела, что обеспечило динамическую стабильность. Кроме того, представлен переходный режим многочленного типа, применяемый для того, чтобы сглаживать устойчивость набора различных движений [2-3]. Впоследствии, местоположения ступни запланированы с учетом формы платформы и позиций ZMP. Примечательно, что время от времени ZMP может существовать таким образом от фактических ходьбы, что может очень отличаться от тех, ссылаясь как при двухмерных случаях. Как только траектории тела и ступней подготовлены, совместные движения могут быть вычислены на основе обратной кинематики. Наконец, распределенная масса и измельченные эффекты контакта при таких движениях по обобщенным координатам оценены посредством аналитического программного обеспечения многочастичной динамики. Результаты моделирования проверяют эффективность предложенных образцов ходьбы [1-4].
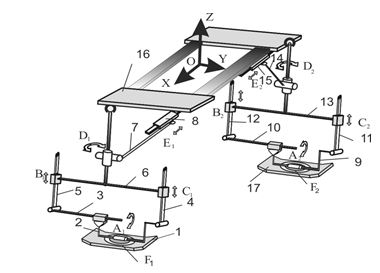
Рисунок 1. Схема строения двуногого робота
На рисунке – 1 показан стопа (опора) 1, который с помощью приводов A1, F1 вращательного движения соединен с голенью 2. Приводы A1, F1 дают возможность вращения стопы относительно сагиттальной и продольной оси при необходимости адаптации к рельефу поверхности и при переносе ноги. Условное бедро представлено звеньями 3-6. Эта кинематическая цепь содержит замкнутый механизм с двумя приводами В1, С1 поступательного движения. Параллельные направляющие 5, 4 и верхняя часть бедра 6 образуют неизменяемую в пространстве конструкцию. Указанный механизм управляется двумя приводами В1, С1, так, что имеется возможность изменять угол наклона стопы (угол атаки при адаптации стопы) в сагиттальной плоскости. Во время ходьбы на регулярном движении, роботы подвергнутся периодическим движениям [2]. Следовательно, они требуют стабильной устойчивой структуры ходьбы. Однако на практике, роботы изменяют стили передвижения от одного к другом. Поэтому также важен стабильный переходный образец. Оба должны быть детализированы впредь.
Литература
- Hein D. Simloid: Evolution of Biped Walking Using Physical Simulation / D. Hein – Berlin, InstitutfürInformatik, 2007. – 415 р.
- Jakobi N. Evolutionary Robotics and the Radical Envelope–of–Noise Hypothesis / N.Jakobi // 1997. – №9 – P. 325–368.
- Palmer M.E. Evolved Neural Controllers for Bipedal Dynamic Walking with Multiple Demes and Progressive Fitness Functions / (GECCO 2009) – Montreal, Canada – 2009. – P.289–301.
- Vukobratovic M., Juricic D. «A Contribution to the Synthesis of Biped Gait», IFAC Symp. Technical and Biological Problem of Control, Yerevan, USSR, 1968.
|