При конструировании обратной лопаты с гидравлическим приводом производится общий расчет, и необходимо учитывать, что они обычно работают в тяжелых условиях рассредоточенного строительства, бездорожья, с большими динамическими нагрузками. При этом нарушается регулирование, изменяются зазоры сопряжений, ослабевает крепление деталей, вследствие чего теряется точность выполнения операций, снижается производительность. Например в работах авторов [1,2] приведены расчеты главных рабочих механизмов, подъемного и напорного механизмов машины, статический расчет. Соответственно в основном определяются условия устойчивости экскаватора и давления на грунт при копании, повороте и передвижении, а также условия уравновешивания поворотной платформы.
Ниже рассматривается методика расчета определения динамической нагрузки на соединительных узлах, которая учитывает все выше перечисленные недостатки, учитывая работу экскаватора в тяжелых условиях данный метод является оптимальным способом.
Динамические усилия, возникающие в машинах или сооружениях, рассматриваются как результат совместного воздействия динамик внешней нагрузки, элементов конструкции и материала.
Под динамикой внешней нагрузки понимается закон изменения внешних усилий на элементы конструкции машины или сооружения во времени [1].
А при работе обратной лопатой наибольший интерес вызывает динамические нагрузки в тяговых канатах. Динамические нагрузки стрелы испытывают особенно при массовых перегрузочных работах. Во время разгона и торможения, когда происходит подъем и опускание груза в канатах и стреле возникают динамические нагрузки. Нагрузки механизма тяги практически идентичны нагрузкам механизма подъема лопаты. Однако вследствие значительной большей жесткости элементов рабочего оборудования (стрелы и рукояти) по сравнению с жесткостью канатов расчет динамических нагрузок в тяговых канатах можно свести к расчетным системам с двумя и одной степенью свободы, которые подобны расчетным системам для канатов подъема рабочего оборудования прямой лопаты.
На рабочие органы, механизмы одноковшовых экскаваторов и металлоконструкции действуют нагрузки, изменяющиеся в широких пределах в течение рабочего цикла. Для определения мощности, затрачиваемой на работу отдельных механизмов, необходимо знать сопротивления, возникающие при выполнении отдельных операции.
Основные нагрузки в элементах машин возникают при копании грунта. Общую силу сопротивления грунта к копанию Ркоп по отношению к направлению движения ковша можно разложить на касательную Рк и нормальную составляющие Рн (рис 1) [2].
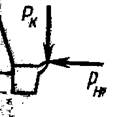
Рисунок 1 – Схема сопротивлений, действующих на ковш
Составляющие Рк и Рн реакции грунта на ковш R0, вес узлов экскаватора и реакции грунта, действующие ходовое оборудование, являются внешними силами, действующими на экскаватор. Они служат исходными данными для определения нагрузок на элементах рабочего оборудования, механизмов, потребной мощности привода и устойчивости экскаватора.
Копать грунт обратной лопатой гидравлического экскаватора можно поворотом рукояти, как предусмотрено у механического экскаватора, поворотом ковша или совмещенными движениями рукояти и ковша.
Возможности обратной лопаты гидравлического экскаватора определяют аналогично механического экскаватора: по схеме представленной на рис. 2. При этом исходя из усилия Рц.р. цилиндра рукояти, определяют возможное усилие копания Рк для положений ковша I-VI.
Рисунок 2 – Схема усилий, действующих на оборудование обратной лопаты при копании поворотом рукояти
Рассмотрим процесс копания поворотом ковша. Схема усилий, действующих на ковш, показана на рисунке 2. Усилие гидроцилиндра поворота ковша Рц.к. определяют по формуле:
|
|
(1)
|
где  – давление в гидроцилиндре.
– давление в гидроцилиндре.
Касательное усилие на режущей кромке ковша
|

|
(2)
|
где  – плечо действия силы
– плечо действия силы  относительно оси Б поворота ковша;
относительно оси Б поворота ковша;
 - расстояние режущей кромки от оси Б;
- расстояние режущей кромки от оси Б;
 – сила тяжести ковша с грунтом;
– сила тяжести ковша с грунтом;
 – плечо действия силы тяжести относительно оси Б.
– плечо действия силы тяжести относительно оси Б.
Реактивное усилие в гидроцилиндре поворота ковша с запасом в большую сторону определяют из предположения, что нормальное усилие  = 0.
= 0.
|
|
(3)
|
где – радиус окружности, описываемой режущей кромкой ковша по отношению к оси Б его поворота;
- – плечо действия силы тяжести ковша и грунта по отношению к оси Б;
 – плечо действия реактивной силы
– плечо действия реактивной силы  гидроцилиндра поворота ковша.
гидроцилиндра поворота ковша.
Реактивное давление в гидроцилиндре поворота ковша
|

|
(4)
|
где  – диаметр гидроцилиндра ковша.
– диаметр гидроцилиндра ковша.
Реактивное усилие в гидроцилиндре поворота стрелы при копании поворотом рукояти равно
|

|
(5)
|
где  – усилие копания; – плечо действия силы относительно оси В поворота стрелы; – нормальная составляющая усилия копания на режущей кромке ковша, принимаемая с запасом;
– усилие копания; – плечо действия силы относительно оси В поворота стрелы; – нормальная составляющая усилия копания на режущей кромке ковша, принимаемая с запасом;  ;
;  – масса стрелы и рукояти;
– масса стрелы и рукояти;  - плечо действия силы относительно оси В;
- плечо действия силы относительно оси В;  – плечи действия сил веса ковша с грунтом, рукояти и стрелы относительно оси В;
– плечи действия сил веса ковша с грунтом, рукояти и стрелы относительно оси В;  – плечо действия усилия цилиндра стрелы относительно оси В.
– плечо действия усилия цилиндра стрелы относительно оси В.
Реактивное давление в гидроцилиндре поворота стрелы
|

|
(6)
|
где  - диаметр гидроцилиндра стрелы.
- диаметр гидроцилиндра стрелы.
Зная центр масс; реактивные усилия в гидроцилиндрах ковша, рукояти и стрелы; наибольшее усилие в одной точке и положение ковша и рукояти, определяем нагрузку на отверстие соединения рукояти и стрелы. Для этого отдельно рассмотрим ковш и рукоятку, разделив их от стрелы (рис. 3) и построим силовой многоугольник для определения окончательных элементов.

Рисунок 3 – Схема сил для определения нагрузки в точке В
По принципу Деламбера можно записать:
|

|
(7)
|
Соответствующими значениями строим силовой многоугольник (рис. 4) для определения окончательных элементов.

Рисунок 4 - Силовой многоугольник
После построения плана сил можно будет найти значения неизвестных  ,
,  и
и  .
.
После найденных неизвестных элементов можно сделать вывод, что нагрузки на проушинах отверстия стрел возникают из силы тяжести рукояти Gр, массы ковша с грунтом, а также инерционных сил, вызванные началом поворота или торможения поворотной платформы.
Литература
1. Волков Д.П. Динамические нагрузки в универсальных экскаваторах-кранах М.: Машиностроение, 1988. 264 с.
2 Гаркави Н.Г., Аринченков В.И., В.В.Карпов, З.Е.Гарбузов, А.И.Батулов, В.М.Донской. Машины для земляных работ. М.: Высш. школа, 1982. – 335с.