Марахин Евгений Юрьевич / Marahin Evgenij Urevich – студент;
Беляева Анастасия Сергеевна / Belyaeva Anastasija Sergeevna – студент,
кафедра автоматизации и робототехники, факультет информационных технологий и компьютерных систем,
Омский государственный технический университет, г. Омск
Аннотация: исследуется задача квазиоптимального по быстродействию управления манипулятором учебного робота. Предложен алгоритм квазиоптимального управления угловой координатой положения руки робота.
Abstract: study the problem of the quasi-time control of the robot manipulator school. An algorithm for quasi-optimal control angular coordinate position of the robot arm.
Ключевые слова: управление роботом, оптимальное управление, быстродействие робота, алгоритм оптимального управления.
Keywords: сontrol of robot, optimal control, the speed of robot, the algorithm of optimal control.
УДК 62-529: 681.532
Мини робот МФЮУ15 предназначен для учебных целей и управляется от компьютера, реализующего функции системы числового программного позиционного управления. Возможность свободного перепрограммирования алгоритмов управления позволяет улучшать процесс управления и обеспечивать его более высокое качество [1,2]. Рассмотрим вопрос повышения быстродействия робота путем модернизации алгоритма управления координатными перемещениями.
В качестве объекта исследования выбрана система поворота плеча руки робота. В исходном варианте управление этой координатой разомкнутое, с использование шагового привода. Однако, в системе предусмотрен потенциометрический датчик угла поворота, что позволяет использовать более совершенное замкнутое управление и осуществить позиционное управление с обратной связью по управляемой координате. [3].
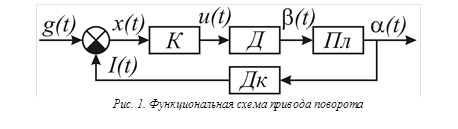
Замкнутая система управления координатой поворота плеча робота представлена на рис. 1: Пл ‒ подвижный компонент (плечо руки) робота; Д ‒ приводной двигатель вместе с электронной схемой управления; К ‒ логика управления, реализованная на программируемом контроллере; Дк ‒ датчик координаты.